(Pau Zamora Ortiz Researcher in Biomechanical Engineering Polytechnic University of Valencia, 26. January, 2024 )
Robotic rehabilitation presents a promising future. The combination of technologies, such as musculoskeletal models, with robots developed for conducting rehabilitation exercises, promises significant improvement in the field of rehabilitation. For this reason, Pau Zamora Ortiz, Researcher in Biomechanical Engineering at Polytechnic University of Valencia, developed a model in C++ and Matlab during his doctoral thesis capable of real-time calculation of muscular and joint forces in the lower limb.
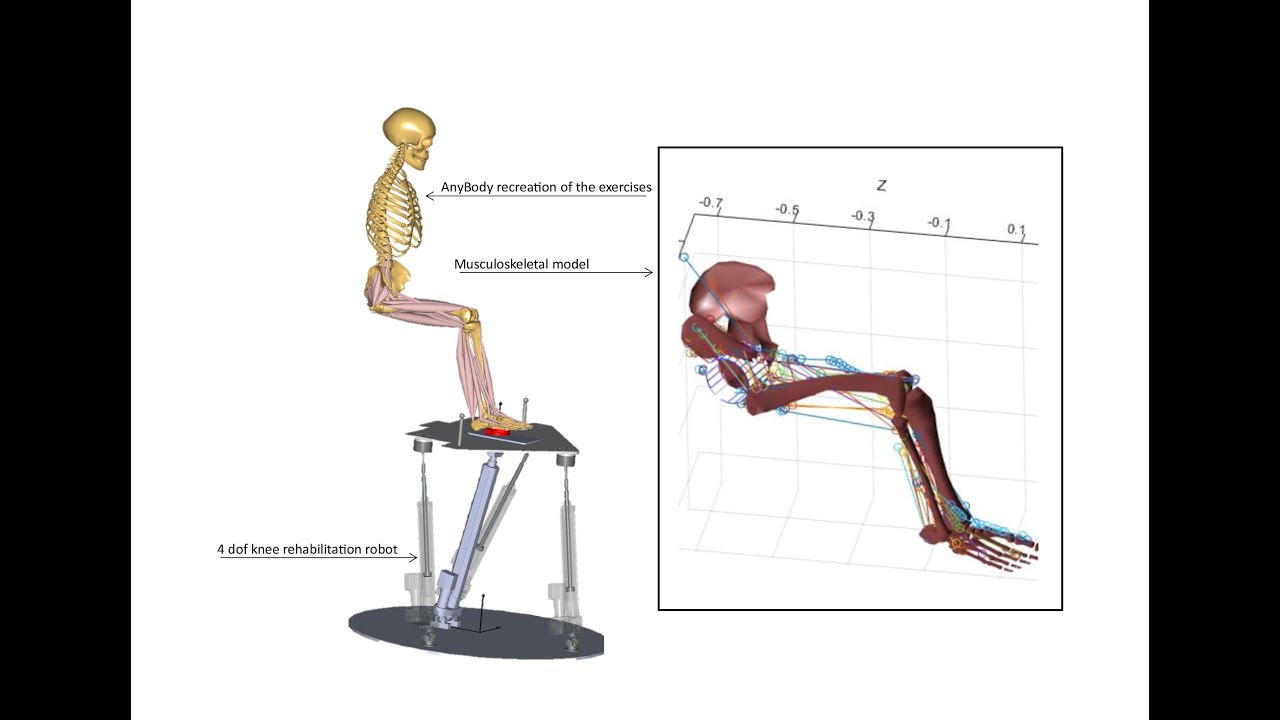
The model was validated by comparing its results with the AnyBody TLEM 1.2 model. For the comparison, the data from the Grand Challenge Competition to Predict In Vivo Knee Loads were used. The model was specifically designed to work in tandem with the parallel rehabilitation robot developed by the research group. Experimental data using the robot and the model were obtained and used for validation. The presentation shows the most innovative parts of the musculoskeletal model and the validation process with AnyBody.
Playback (139 MB)Presentation (2.77 MB)
YouTube