

Who is AnyBody Technology?
AnyBody Technology is a pioneer and leading provider of mechanical modeling of the living body, in particular musculoskeletal modeling (MSM). The all-dominating area of application is of course the human body, but our technology applies to analysis of any creature – currently living, pre-historic, or imaginary. Our base technology is the AnyBody Modeling SystemTM – the simulation engine – and the AnyBody Managed Model Repositories for instance containing the world’s most comprehensive human full-body musculoskeletal model.
Modeling and simulation software
We deliver the AnyBody modeling and simulation software, models, and a variety of assisting tools for a setting up a full simulation tool chain. We also provide simulation consultancy service for your specific R&D purposes, or as support and assistance to your in-house simulation resources.


Why Use Musculoskeletal Modeling Software?
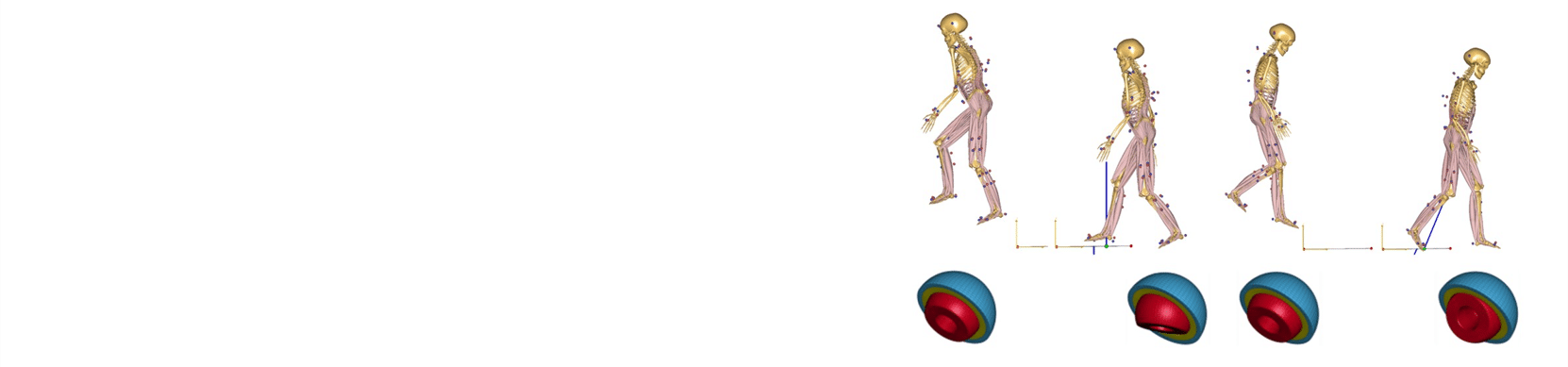
Musculoskeletal modeling is a computational way to investigate the mechanical functions of the living body.
Musculoskeletal models output loading in all muscles, joints, and potentially other tissue of the body, as well as potential derived quantities targeting for instance loading of devices, ergonomic analysis, human performance in sports, and the development of cutting-edge designs. Augment laboratory and field studies with biomechanical analyses and use simulation studies as in-silico evidence of the efficacy and safety of your device.
Simulation can make qualified estimation of properties inside the body, which are mostly impossible and unethical to measure – Simulation is the only alternative.
For the exact same reason comprehensive validation can be difficult, but we, together with our many closer users and partners, are striving to provide the best possible verification and validity indicators of our distributed models – see our comprehensive publication list and webcast library.
Wide variety of areas and applications
AnyBodyTM is one of the few dedicated musculoskeletal engines in the world today and our human body model is used across a broad range of industries, many of which have embraced Product Lifecycle Management, users want to understand and document how their product performs in concert with the human body.
Get ready! The emerging adoption of musculoskeletal modeling and simulation sets the stage for a new generation of products optimized for minimal body loads, optimal functional performance, and better fact-based documentation of ergonomic features.
Select your Business









Sign up to our newsletter
Sign up to receive webinar invitations, information about events and other news!
